








方案详情
文
This paper presents preliminary results of research being conducted at MIT on the dynamics of an azimuthing podded propulsor, with emphasis on the application to nonlinear vehicle maneuvering
dynamics. The paper focuses on the experimental investigation of propulsor-induced maneuvering forces and moments, as well as characterization and documentation of the vortex wake. A test
program of quasi-steady and unsteady/dynamic tests on an azimuthing podded propulsor unit has been carried out in the MIT ship model towing tank. Forces and motor current were measured for subsequent implementation of a multi-parameter dynamic model of an azimuthing propulsor within nonlinear vehicle maneuvering simulations. Additional testing was conducted with the azimuthing propulsor installed in a surface vehicle attached to a Planar Motion Mechanism (PMM), where quasi-steady forces and moments were measured. Parameterized results, as well as notable maneuvering force effects and visualizations of the wake are presented. Parametric results clearly illustrate unique characteristics of vectored-propulsion, including significant increase in vectored thrust and strong “destabilizing” thrust and normal force with propulsor azimuth, plus other important related effects. Limited results of wake flow visualization, using Particle Image Velocimetry (PIV), are also presented.
方案详情

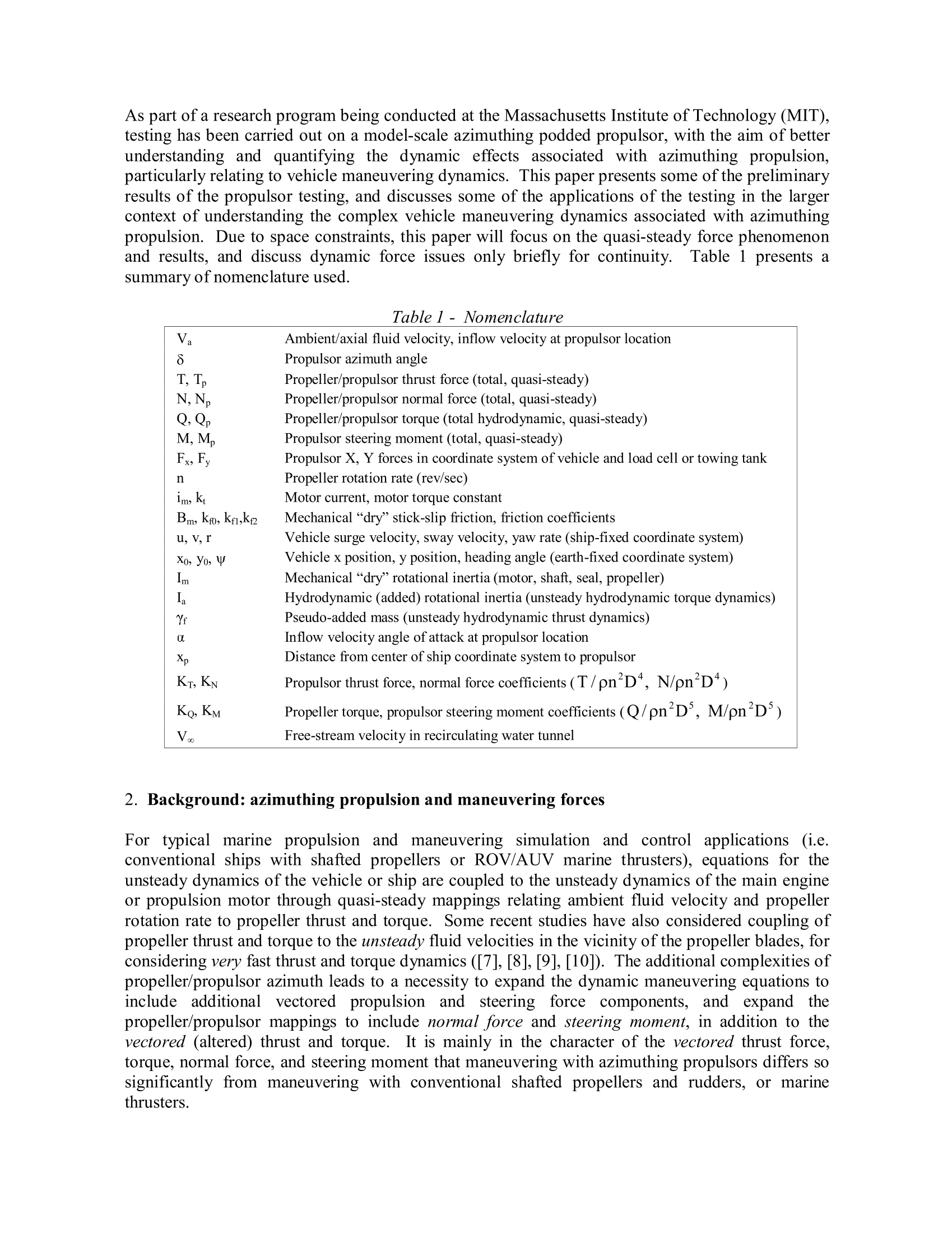
PRELIMINARY RESULTS OF TESTING ON THE DYNAMICS OF AN AZIMUTHING PODDED PROPULSOR RELATING TO VEHICLE MANEUVERING J.W. Stettler, Massachusetts Institute of Technology, Cambridge, MA, USA F.S. Hover, Massachusetts Institute of Technology, Cambridge, MA, USA M.S. Triantafyllou, Massachusetts Institute of Technology, Cambridge,MA, USA This paper presents preliminary results ofresearch being conducted at MIT on the dynamics ofanazimuthing podded propulsor, with emphasis on the application to nonlinear vehicle maneuveringdynamics. The paper focuses on the experimental investigation of propulsor-induced maneuveringforces and moments, as well as characterization and documentation of the vortex wake. A testprogram of quasi-steady and unsteady/dynamic tests on an azimuthing podded propulsor unit hasbeen carried out in the MIT ship model towing tank. Forces and motor current were measured forsubsequent implementation of a multi-parameter dynamic model ofan azimuthing propulsor withinnonlinear vehicle maneuvering simulations. Additional testing was conducted with the azimuthingpropulsor installed in a surface vehicle attached to a Planar Motion Mechanism (PMM), wherequasi-steady forces and moments were measured.Parameterized results, as well as notablemaneuvering force effects and visualizations ofthe wake are presented. Parametric results clearlyillustrate unique characteristics ofvectored-propulsion, including significant increase in vectoredthrust and strongg “destabilizing” thrust and normal force with propulsor azimuth, plus otherimportant related effects. DLimited results of wake flow visualization, using Particle ImageVelocimetry (PIV), are also presented. 1. Introduction While azimuthing propulsion in the form of low-power electric, hydraulic, or right-angle gear-driven steerable thrusters has been around for nearly half a century, it has been only in the lastdecade that electric motor technology had advanced to the point where implementation of high-power azimuthing electric-drive propulsors has become practical for primary propulsion (andsteering). The advantages of azimuthing electric-drive primary propulsion (often called podded ormodular propulsion) are numerous, including design flexibility leading to improved arrangementefficiency, power management, maneuverability, and even reduced hull resistance. While the implementation of podded propulsors into the commercial ship market has been swift, thecomplete understanding of their hydrodynamics through research, particularly in the area ofmaneuvering performance, has been limited. Van Terwisga et al. [1] provide a general overview ofthe history of steerable propulsion units, and address general hydrodynamic issues associated withtheir design and use. Toxopeus and Loeff [2] discuss recent application of podded propulsion froma maneuvering perspective, comparing maneuverability between specific ship designs withconventional propulsion and podded propulsion, and highlighting the general benefits and points ofattention. Additional comparative maneuvering testigng has begen conduct.ed under the auspices ofthe OPTIPOD research program funded by the European Union, with results expected to bepublished over the coming year. Although free-running and captive model maneuverability testingon ships with pods has been conducted as mentioned above, there has been little basic research donespecifically in the area of prediction and simulation of dynamic maneuvering capabilities associatedwith podded propulsors. Research of this type conducted in the past has focused mainly on thedesign and optimization of low-power thrusters and dynamic positioning systems for deep waterapplications at slow speeds or in currents (Minsaas and Lehn [3], Norrby and Ridley [4], Nienhuis[5], Wichers, et al. [6]). As part of a research program being conducted at the Massachusetts Institute of Technology (MIT),testing has been carried out on a model-scale azimuthing podded propulsor, with the aim of betterunderstanding and quantifying the dynamic effects associated with azimuthing propulsion,particularly relating to vehicle maneuvering dynamics. This paper presents some of the preliminaryresults of the propulsor testing, and discusses some of the applications of the testing in the largercontext of understanding the complex vehicle maneuvering dynamics associated with azimuthingpropulsion. Due to space constraints, this paper will focus on the quasi-steady force phenomenonand results, and discuss dynamic force issues only briefly for continuity. Table 1 presents asummary of nomenclature used. Table 1-Nomenclature 2. Background: azimuthing propulsion and maneuvering forces For typical marine propulsion and maneuvering simulation and control applications (i.e.conventional ships with shafted propellers or ROV/AUV marine thrusters), equations for theunsteady dynamics of the vehicle or ship are coupled to the unsteady dynamics of the main engineor propulsion motor through quasi-steady mappings relating ambient fluid velocity and propellerrotation rate to propeller thrust and torque. Some recent studies have also considered coupling ofpropeller thrust and torque to the unsteady fluid velocities in the vicinity of the propeller blades, forconsidering very fast thrust and torque dynamics ([7],[8],[9],[10]). The additional complexities ofpropeller/propulsor azimuth leads to a necessity to expand the dynamic maneuvering equations toinclude additional vectored propulsionn and steering fforce components,and expand thepropeller/propulsor mappings to include normal force and steering moment, in addition to thevectored (altered) thrust and torque.It is mainly in the character of the vectored thrust force,torque, normal force, and steering moment that maneuvering with azimuthing propulsors differs sosignificantly from maneuvering with conventional shafted propellers and rudders, or marinethrusters. There has been little documented research and theory in the marine field related to dynamic forcesassociated with propellers which are azimuthed or subjected to oblique flows. Crane et al.[11]provide brief discussion of the qualitative effects of oblique inflow to propellers and their relation tomaneuvering stability and turning radius. Carlton [12] provides brief qualitative discussion ofquasi-steady tests which have been conducted on low-power azimuthing thrusters. Oosterveld [13]and Minsaas and Lehn [3] provide limited experimental multi-quadrant data for specific ductedazimuthing low-power thrusters for dynamic positioning and slow speed maneuvering. The fundamental importance ofunderstanding vectored propulsion can be illustrated by consideringthe forces that result from a propeller that is operating in an oblique inflow (fig. 1). First, the thrustand torque vectors along the axis of the propeller shaft are affected by a reduction in effective axialinflow velocity as the propeller is azimuthed relative to the inflow. Intuitively, the reduction ineffective axial inflow velocity (i.e. with the cosine of the angle) reduces the effective advancecoefficient in terms of the inflow velocity to the propeller, and thus increases thrust and torque inaccordance with“typical”propeller thrust-torque-speed characterization. Second, a side force (ornormal force) is created, due to unequal angles of incidence on the blade elements as they rotatethrough the oblique inflow [11], and the transverse roll-up of the wake along its top and bottomedges, essentially forming two dominant vortex bundles (see for example Leishman [14],[15]).Regardless of the direction of rotation of the propeller, the net normal force is in the same direction,away from the inflow [11]. Thus, for a ship with a conventional fixed shaft/propeller making aturn, the propeller produces a normal force which tends to counter the turn (i.e. produces astabilizing yaw moment). However, for a ship with an azimuthing propulsor, where the propulsoritself is azimuthed to create the turning force, the normal force (in addition to the vectored thrustforce) creates a destabilizing yaw moment. Fig. 1-Thrust, torque, and normal forces resulting from a propeller in oblique inflow Thus the net effect of azimuthing propulsion, in terms of maneuvering forces, is to produce forceswhich vary in a nonlinear manner with inflow angle, propeller speed and velocity (orlondimensional advance coefficient J=V/nD). This would suggest a nonlinear 3-dimensionalmapping of quasi-steady propeller thrust, torque, and normal force with azimuth angle and advanceCeCfficienItt should be noted that, for an azimuthing podded propulsor, this also implies acoincidental mapping of the hydrodynamic moment on the propulsor about its steering shaft (i.e. thesteering moment). In addition to the nonlinear mappings of quasi-steady thrust, torque, normal force and steeringmoment, there are also unsteady hydrodynamic force components associated with accelerating or decelerating flows. In terms of maneuvering forces, the term unsteady is used here to denote thoseforce components which arise due to time rate-of-change of the main state variables associated withthe propulsor (i.e. n, V,and potentially 8 and). For unsteady propeller rate and inflow velocity,the unsteady force components would amount to inertial effects, while for unsteady azimuth angle,the unsteady force components could be friction or drag-related, or inertial. 3. Maneuvering dynamics associated with an azimuthing propulsor 3.1 Combined vehicle maneuvering dynamics In order to tie together and motivate the test program, a combined dynamic maneuvering model fora vehicle with azimuthing propulsion is briefly discussed. A combined maneuvering model can bedeveloped based upon some fundamental principles of dynamics, and parameters determinedthrough a suitable test program for the various force components and interactions. The dynamics ofan azimuthing propulsor can be incorporated into an overall vehicle dynamic maneuvering modelby coupling the equations for the vehicle dynamics to those of the propulsor, through dynamicequations relating fluid velocity and propeller rotation rate to propeller thrust and torque. Thisrelationship, for a surface vehicle with a single azimuthing propulsor driven by a DC motor, can besimply illustrated as in fig. 2.In order to carry out system identification and combined systemsimulation or control of the maneuvering dynamics of the vehicle, the various dynamic andkinematic relations in the model must be put into suitable forms, whose parameters can bedetermined (identified) through a reasonable test program. vr x Yo Fig. 2- Combined dynamic maneuvering model for a surface vehicle with a DC motor-drivenazimuthing propulsor The combined vehicle dynamic and kinematic equations can be written based upon “standard”nonlinear equations for maneuvering of a surface vehicle in the horizontal plane, modified toaccount for the vectored forces associated with an azimuthing propulsor, plus interaction terms.Fig. 3 defines proposed coordinate systems and velocities, and illustrates how the kinematics of thevectored propulsion forces relate to the vehicle. While not presented here, combined maneuveringequations of motion can be written based upon any of a number of ship maneuvering models, forexample the Abkowitz maneuvering models [16], [17],[11], with modifications to account for thevectored propulsor forces.The nonlinear dynamic maneuvering equations are typically developedbased upon coefficients or derivatives which come from Taylor series expansions of thehydrodynamic forces about assumed (design) operating points [16], [11]. In addition to thestandard maneuvering equations, kinematic relations that transform ship-referenced coordinates toearth-referenced coordinates are required.i.Because the inflow conditions to the azimuthingpropulsor are coupled to the dynamics of the vehicle motion, an additional set of propulsorkinematic relations is required,such as: where Fxp and Fyp are propulsor forces in the ship-referenced coordinate system, with the thrust (T)and normal force (N) defined in the propulsor-referenced frame (see fig. 3). In general, T and Ncan be steady or unsteady and nonlinear, and therefore must be transformed in the time domainthrough a nonlinear transformation of this type. Fig. 3-Coordinate system and force definitions for combined maneuvering in the horizontal plane Until recently, propeller torque and thrust coupling to the vehicle and motor/engine dynamicequations were typically considered only through quasi-steady mappings (i.e. equations) topropeller rotation rate and advance velocity (or advance coefficient). In recent years, some efforthas been made to integrate unsteady torque and1 t_hru1st hydrodynamics for the purpose of modelingthe dynamics of smaller underwater vehicles, which may respond more quickly to rapid inputcommands. Healey et al.[7] proposed a novel four quadrant model for thrusters used for motioncontrol of ROV and AUV underwater vehicles. Their model included four quadrant mappings ofthe propeller blades’lift and drag forces using a blade-element approach, and coupled with the DCmotor dynamics, as well as fluid system dynamics, utilizing an unsteady momentum equation forpropeller axial flow.V.Bachmayer et al. [9] also modeled the unsteady momentum equation forpropeller rotational flow.Blanke et al.[10] included the ship/vehicle velocity in an axialmomentum equation model. These analyses demonstrated the capability to model very fast thrusttransients from very rapid input torque changes (i.e. step current inputs). However, these unsteadymomentum models require measurement of the local propeller flow velocities, something of animpracticality for real vehicles in open water.r. Fossen and Blanke [18] developed methods ofimplementing more accurate shaft speed controllers using nonlinear control theory with estimationof the (unmeasured) axial velocity at the propeller disc, which is required for implementation of thepresented unsteady thrust models. Although due to space constraints results of dynamic testing are not presented in this paper, thebasic concept of integration of unsteady dynamics into a podded propulsor maneuvering model willbe briefly discussed for continuity.Unsteady torque and thrust equations are presented whichincorporate the assumption that the fluid velocity induced at the propeller disc is approximatelyproportional to the rotation rate of the propeller (or, more precisely, the acceleration induced at thepropeller disc is approximately proportional to the acceleration of the propeller). This amounts toassuming a quasi-steady propeller slip, and also that the acceleration of the vehicle is smallcompared to the acceleration of fluid induced at the propeller disc. 3.2 Motor and propeller torque dynamics, thrust dynamics Referring to fig. 1, the form of a simple equation relating motor dynamics to propeller torque(referred to as the motor torque equation) can be derived based upon fundamental principles of thetorque dynamics of an electric motor.For a direct current permanent magnet motor, this ispresented in a“standard”form (see for example [19]) where ktim (torque constant times input current) is the motor torque, Im is the mechanical“dry"rotary moment of inertia and Bm(n) is a general mechanical“dry”stick-slip friction associated withthe motor, shaft and seal, and propeller. The latter can be written in a general quadratic form where the first term is a Coulomb friction, and the latter are dynamic friction terms. Q is the totalhydrodynamic torque on the propeller, which in general includes both friction/drag components andinertial (unsteady) components. This can be written simply as Note that Ia,which is a hydrodynamic (added) rotational inertia, and Qp, which is the quasi-steadyhydrodynamic torque, could both depend, in general, on propeller rate, ambient fluid velocity, andazimuth angle.Since Ia is an unsteady term, it could also depend upon the unsteady states(n,V,etc.), which is equivalent to parameterizing an unsteady propeller slip for capturing fasterdynamics, as mentioned above. Note also that, although one simple equation has been written herefor a DC motor, more complex equations of the same basic form could be written for electricmotors (or other prime-movers) with more complex dynamics, so long as the torques remaincoupled. Although derivation details and results will not be presented here, a similar simple expression forthe thrust dynamics can be developed based upon considerations of conservation of linearmomentum for a propeller in oblique flow. Using the previously mentioned assumptions regardingpropeller slip and velocities, a simple expression for unsteady thrust can be written where the parameter Yf is a pseudo-added mass and T, is the quasi-steady hydrodynamic thrust,which could both depend, in general, on propeller rate, ambient fluid velocity, and azimuth angle. As with Ia for the torque equation, adding dependence of y on unsteady states (n,V,etc.) isequivalent to parameterizing an unsteady propeller slip for capturing faster dynamics. 4. Experimental setup The propulsor testing is part of a research project which also includes numerical maneuveringsimulation and free-running testing of a 4 meter autonomous surface vehicle propelled with thesingle dynamically-azimuthed podded propulsor (fig.4). The autonomous surface vehicle is of amodular design, so that the various components can be separated and tested as subsystems. Anonboard PC104-based computer system provides serial and analog data acquisition and controlcapability. Data acquisition and control interface is through Ethernet, which can be hard or wirelessthrough an onboard wireless Ethernet bridge. Data acquisition and control functions utilize the xPCTarget software package (Mathworks, Inc.). The system also includes PWM brush servoamplifiers, motor current sensor, navigation sensors (as required), and 24 volt power. Thepropulsor itself is a modified trolling motor (Motorguide model ET54 with 3-bladed Machete IIaluminum propeller), which has been modified using a Hall-effect latching magnetic sensor (withmagnets placed inside the propeller hub), enabling closed-loop speed control. The propulsor is 30cm in length and 9 cm in diameter, with the propeller 25 cm in diameter.The propulsor isdynamically-azimuthed, through a hull penetration, by a Pittman model GM9234S031isservogearmotor, with an angle sensor enabling closed-loop dynamic azimuth control. Both motors arepermanent magnet DC and are controlled using the PWM brush servo amplifiers in the torque(current) control mode. Fig. 4-Autonomous surface vehicle with single dynamically-azimuthed podded propulsor on PMM Atest program for experimental identification of the various propulsor and vehicle-relatedparameters was conducted in the MIT towing tank, recirculating water tunnel, and on the planarmotion mechanism (PMM) at the U.S. Naval Academy. A full program of nonlinear PMM tests(fig. 4),including both bare hull and fully-appended (self-propelled), was also conducted with theautoi omousS surface vehicle in order to identify maneuvering coefficients for subsequentmaneuvering simulations. Quasi-steady and dynamic force testing in the MIT towing tank was conducted utilizing a testfixture incorporating an AMTI model MC6 six axis load cell and amplifier, as shown in fig. 5.Both propulsor and servo gearmotor were founded within a structure attached below the load cell.The propulsor was dynamically-azimuthed in the horizontal plane with Rulon shaft bearings thougha hydrodynamic strut. Because of the large moment arm, the load cell output was calibrated dailyin place. Because of the relatively low fundamental natural frequencies of the test fixture (10 Hz), output signals were also post-process-filtered using sharp cutoff zero-phase-shift digital lowpassfilters at 5 Hz (this ultimately provided some limitations on bandwidth of the force output signals).Data acquisition and control utilized the modular components of the autonomous surface vehicle,with a sampling rate of 1000 Hz. Fig. 5-Dynamically-azimuthed propulsor in test fixture in MIT towing tank Quasi-steady and dynamic wake visualization and documentation and additional dynamic testingwas conducted in the MIT recirculating water tunnel utilizing an existing test fixture incorporatingthree coplanar axial strain-gauge load cells with amplifiers, as shown in fig. 6. The servo gearmotorwas attached to the floating collar on the fixture, and the propulsor was dynamically-azimuthed inthe horizontal plane with Rulon shaft bearings through the floating collar. Data acquisition andcontrol utilized the modular components of the autonomous surface vehicle, with a sampling rate of1000 Hz. The main purpose of the testing in the water tunnel was to conduct dynamic wake flowvisualization using particle image velocimetry (PIV) and cavitation visualization using high-speedvideo. The PIV utilized a New Wave Research Gemini dual head laser PIV system, with LaVisionDaVissoftware for control of the laser and camera systems. The wake was illuminated using ahorizontal laser sheet, with CCD camera acquiring images of the wake from below; thus mid-planehorizontal wake cut velocities were measured. In the PIV system internal triggering mode, laserswere fired at approximately 7.5 Hz. In the external triggering mode, lasers were synchronized tothe propeller rotation. Internal triggering was utilized to obtain instantaneous results for dynamicwake (unsteady) conditions, and external triggering was utilized to obtain phase-averaged resultsfor quasi-steady, azimuthed conditions. Fig. 6-Dynamically-azimuthed propulsor in test fixture in MIT recirculating water tunnel,wake illuminated with horizontal laser sheet 5. Experimental investigation and identification of propulsor parameters A number of different types of tests were conducted specifically to identify the fundamentalparameters associated with the azimuthing propulsor equations. Tests included both quasi-steady71(i.e. constant in propeller speed, carriage velocity, and azimuth angle), as well as a number ofdynamic tests (such as step current input, ramp current input, sinusoidal current input, step azimuthcommand, and sinusoidal azimuth). Due to space constraints, only the quasi-steady results arepresented in this paper. Since it was impractical to install a propeller torque load cell in the small propulsor, the propellertorque was calculated from accurate motor current measurement, based upon the motor torqueequation, by first experimentally identifying the various parameters of the motor torque equation.Determination of the motor torque constant is discussed in a number of references, for example[19]. The torque constant for the propulsion motor was determined by driving the motor withanother motor, measuring rotation speed, and measuring the voltage generated across the terminals.The slope of the linear curve fit of shaft speed vs. measured voltage provided the voltage (or speed)constant Kevr (fig. 7). By SI unit equivalence, K. (in N-m/A) is equivalent to KEMF (in V-s/rad).Referring to equations (2) through (4), the mechanical“dry”friction coefficients and mechanical“dry" rotational inertia were determined by performing a series of step current input tests in air,where propeller hydrodynamic torque is negligible (note: the shaft seals were maintained wet tomaintain lubrication). The plot of steady-state propeller speed vs. input torque (ki) was fit with aquadratic to determine the coefficients of Bm(n) (fig. 7). Fig. XX-Determination ofpropulsion motor torque constant by linear fit,and mechanical“dry”friction coefficients by quadratic fit The quasi-steady thrust, normal force, torque and steering moment were determined (mapped) byrunning the propulsor over a range of advance coefficients, J=V/nD (by systematically varyingpropulsor RPM and carriage velocity) and the entire range of azimuth angles.The torque wascalculated using equations (2) through (4) from the measured current, along with the identifiedmotor torque constant and mechanical friction terms.The thrust, normal force, and steeringmoment were calculated from the load cell output, applying a transformation from the load cell(towing tank) coordinate system to the propulsor coordinate system (see also fig. 3): Fig. 8 shows the results for values of J up to 0.6 and azimuth angles to ±90°. The surface plots aremesh plots developed using bicubic interpolation of data points, which are also shown. The smoothbut nonlinear natre is clearly evident. The plots show clearly the nature of vectoredpropulsionwith regards to an azimuthing propulsor as discussed in section 2 for the generic case of a propellerin oblique flow. For example,a propulsor which is turned clockwise (+8) to initiate a turn to port(counterclockwise) would produce a positive normal force (i.e. a destabilizing moment tending toincrease the rate of the turn). An opposite destabilizing moment would occur for a turn to starboard(clockwise).The additional destabilizing effect of thrust in a turn is also evident (i.e. vectoredthrust is increased compared to the zero-azimuth condition, also producing a destabilizing moment). Fig. 9 shows thrust and torque for the entire range of azimuth angles (±180°). Although there isclearly some scatter at larger angles due to the unsteady nature of the reversing wake (8>±90°),there are also clearly regular nonlinear features associated with the changing wake character. Notethat thrust is taken from the force load cell, while torque is calculated from the motor current (i.e.there is no sensor correlation), yet the nonlinear character of the two plots is very similar. Thus, thebasic irregular features of both thrust and torque shown in foirg. d9a taare srceaatl tqeura)s iF-sitne a1dy0 nforcephenomenon (i.e. not load cell measurement irregularity or data scatter).Fig. 10 provides adifferent presentation of the full (±180°) data in the form of contour plots for each of the testedadvance coefficients, providing a more detailed view of the data. Note that small asymmetries inlocations and magnitudes of maxima are due to the influence of the direction of propeller rotation(left-handed propeller). Fig. 10 also provides a“standard"” plot of force and torque coefficients andefficiency vs. advance coefficient for the specific case of zero azimuth angle. 6. Visualization and documentation of the wake of an azimuthing propulsor using PIV To support investigation of the azimuthing propulsor, the quantitative experimental investigation ofthe wake of the azimuthing propulsor was carried out in the MIT recirculating water tunnel using2D Particle Image Velocimetry (PIV). It is anticipated that the characterization of the wake in thismanner provides a means for better understanding the complex flows associated with an azimuthingpropulsor, as well as providing an additional tool for validation of unsteady codes and flowmodeling tools.5.The general approach was very similar to that taken by DiFelice et al. [20] for astationary propeller in steady axial flow, and therefore generic discussion of PIV and application toinvestigation of propeller wake velocities will not be made here; the reader is referred to DiFelice etal. and other informative papers by Gui et al. [21] and Westerweel [22]. The focus in this paper ison the presentation and interpretation of results of the flow visualization, and documentation of thevelocities of several of the quasi-steady and dynamic wakes. Particular notice is made to the bladewake velocities, tip vortex spatial development and fluctuations, and overall angular parametersassociated with the quasi-steady wakes. As discussed in section 4, for the quasi-steady azimuth conditions, the laser was synchronized to therotation of the propeller, and a phase-averaging technique was utilized to calculate the quasi-steadyvelocities in the horizontal mid-plane of the wake. The coordinate system in the plots is centeredon the main azimuth shaft of the propulsor (located 13.3 cm forward of the aft face of the hub).Phase-averaging in each case was made over 45 image sets, each synchronized to the same bladelocation. Fig. 11 provides a series of plots showing the character of the wake for two representativequasi-steady azimuth conditions (0° and 20°). The top plots are velocity maps providing the Fig. 8-Quasi-steady thrust force, normal force, torque, and steering momentvs. advance coefficient vs. azimuth angle (to ±90° Fig. 9-Quasi-steady thrust force and torque vs. advance coefficient vs. azimuth angle(full azimuth to ±180°) Fig. 10-Contour plots of quasi-steady force coefficients vs. azimuth angle (±180°,quasi-steady force coefficients and efficiency vs. advance coefficient (8=0°) magnitude of the total in-plane velocity, normalized by the free-stream velocity (measured upstreamof the propulsor). The middle plots are velocity maps providing the magnitude of the induced(perturbation) velocity, also normalized by the free-steam velocity.The bottom plots aredistributions of the calculated vorticity, nondimensionalized by the free-stream velocity and thepropeller diameter. The plots clearly demonstrate the character of the quasi-steady wake for moderate propulsorazimuth. The viscous wake due to the boundary layer on the blades is highlighted by the defect ininduced velocity plots and vorticity distribution. These velocity defects transition to the tip vortex,and rapidly diffuse as the wake convects downstream. The traces of the tip vortices are obvious,particularly in the plots of induced velocity and vorticity distribution. But, tip vortices also rapidlydiffuse as they convect downstream. Highlight should be made to the significant hub wake (due tothe very large and flat-faced hub that is 1/3 the diameter of this particular propeller), whichproduces significant turbulence in its wake, creating additional unsteadiness to the wake.Thestrong hub wake consists of strong radial velocity components, which are evident in all the plots. One other important note should be made regarding the quasi-steady azimuth wake velocitiesdetermined from the PIV. It is clear from this set of data images, and also from many others, thatthe magnitude of velocity (or induced velocity) is greater for the “upstream"or“outboard"side ofthe wake for the azimuthed case (for the horizontal wake cut). An explanation for this Phase-averaged velocity field, MA Phase-averaged velocity field, V|N 0.4 0.4 -5 -0.4 -0.3-0.2-0.1 0 0.2 0.3 0.4 0.5 0.6 -0.4 -0.3-0.2:-0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 x/D Fig. XX-Phase-averaged velocity field magnitude (top), perturbation (induced) velocity magnitude(middle), and vorticity distribution (bottom) for quasi-steady conditions:RPM=700, Uo=0.93 m/s (J=0.32), 8=0°(left) and 8=+20° (right) wake velocity asymmetry can be understood by considering that the vortex wake undergoesdistortion under the oblique inflow. Experiments for helicopters in forward flight have confirmedvortex wake distortion effects, and progress has been made in modeling this distortion using free- vortex wake models (Leishman [14], [23]). The net result is that the “upstream" side of the vortexwake is stretched (and the “downstream" side is compressed), such that the “upstream” wakevelocities are higher. For this small azimuth angle, the effect is minimal, but noticeable. 7. Conclusions This paper has presented some of the preliminary results of research being conducted at MIT on thedynamics of an azimuthing podded propulsor, with emphasis on the application to nonlinear vehiclemaneuvering dynamics.While the paper has focused on the presentation of quasi-steady forceaspects of azimuthing propulsion, to put the concept of unsteady vectored-propulsion into thecontext of application to vehicle maneuvering, basic dynamic relations for propulsor torque andthrust have been provided, and integration or coupling of the propulsor dynamics and kinematicswith the vehicle maneuvering dynamics and kinematics has been discussed.. The results of thequasi-steady testing have been parameterized and presented in a manner to document the nonlinearcharacter of quasi-steady maneuvering forces associated with azimuthing podded propulsion. Theresults clearly illustrate unique characteristics of vectored-propulsion, including generation of audsizable normal force, significant increase in vectored thrust, and the “destabilizing”momentassociated with propulsor azimuth. Limited results of wake flow visualization, using Particle ImageVelocimetry (PIV), have also been presented. Acknowledgements Funding support of the MIT Sea Grant Program is gratefully acknowledged. References 1. Van Terwisga, T., Quadvlieg, F., and Valkhof, H., (2001),“Steerable propulsion units:hydrodynamic issues and design consequences,” Paper written on the occasion of the 80"anniversary of Schottel GmbH & Co., presented on 11 August 2001. 2. Toxopeus, S., and Loeff, G., (2002),“Maneuvering aspects of fast ships with pods,”3International EuroConference on High Performance Marine Vehicles HIPER'02, Bergen, pp.392-406. ( 3. Minsaas, K .J. and Lehn, (1978), E., Hydrodynamical Characteristics o f Rotatable Thrusters,NSFI Report R-69.78, The Ship Research Institute of Norway, T r odheim, Norway. ) ( 4. Norrby, R .A. and R i dley, D.E., (1980), “Notes on Th r usters for S h ip Maneuvering andDynamic Positioning,”SNAME Transactions, Vol. 88, pp. 377-402. ) 5. Nienhuis, U., (1992), Analysis of Thruster Effectivity for Dynamic Positioning and Low SpeedManeuvering, PhD dissertation, Delft University of Technology. 6. Wichers,J., Bultema, S., and Matten, R., (1998),“Hydrodynamic research on and optimizingdynamic positioning system of a deep water drilling vessel,” Offshore Technology ConferenceOTC, Vol.4,No.8854. 7. Healey, A.J., Rock, S.M., Cody, S., Miles, D. and Brown, J.P., (1994),“Toward an improvedunderstanding of thruster dynamics for underwater vehicles,”Proceedings 1994 Symposiumon Autonomous Underwater Vehicle Technology, Cambridge, MA. 8. Whitcomb, L.L. and Yoerger, D.R., (1999),“Development, comparison, and preliminaryexperimental validation of nonlinear dynamic thruster models,”IEEE Journal of OceanicEngineering, Vol. 24,No.4, pp. 481-494. 9. Bachmayer, R., Whitcomb, L., and Grosenbaugh, (2000),“An accurate four-quadrantnonlinear dynamical model for marine thrusters: theory and experimental validation,”IEEEJournal ofOceanic Engineering, Vol. 25,No. 1,pp. 146-159. 10. Blanke, M., Lindegaard, K.P., and Fossen, T.I., (2000),“Dynamic model for thrust generationof marine propellers,”Proceedings IFAC Conference on Maneuvering of Marine Craft(MCMC2000), Aalborg, Denmark, pp.23-28. 11. Crane, C.L., Eda, H., and Landsburg, A., (1988),Principles of Naval Architecture, ChapterIX (Controllability), Lewis, E.V. (Ed.), The Society of Naval Architects and MarineEngineers, Jersey City, New Jersey. 12. Carlton, J.S., (1994), Marine Propellers and Propulsion, Butterworth-Heinemann, Oxford. 13. Oosterveld, M.W.C., (1973), “Ducted propeller characteristics,” Proceedings of theSymposium on Ducted Propellers, The Royal Institute of Naval Architects, Teddington, U.K. 14. Leishman, J.G., (2000), Principles of Helicopter Aerodynamics, Cambridge University Press,Cambridge, UK. 15. Leishman, J.G., (2002),“Challenges in modeling unsteady aerodynamics of wind turbines,”21 ASME Wind Energy Symposium and 40 AIAA Aerospace Sciences Meeting, Reno,Nevada. 16. Abkowitz, M.A., (1969), Stability and Motion Control ofOcean Vehicles, The M.I.T. Press,Cambridge, MA. 17. Abkowitz, M.A., (1980), “Measurement of hydrodynamic characteristics ffrom shipmaneuvering trials by system identification,”SNAME Transactions, Vol. 88, pp.283-318. 18. Fossen, T.I. and Blanke, M., (2000),“Nonlinear output feedback control of underwatervehicle propellers using feedback form estimated axial flow velocity,"IEEE Journal ofOceanic Engineering, Vol. 25, No. 2, pp. 241-255. 19. Electro-craft Corp., (1977), DC Motors, Speed Controls, Servo Systems: An EngineeringHandbook, prepared by Electro-craft Corporation, Pergamon Press, New York. 20. DiFelise, F., Romano, G., and Elefante, M., (2001),“Propeller wake analysis by means ofPIV,” Proceedings of the Twenty-third Symposium on Naval Hydrodynamics, NationalAcademy Press, Washington, DC. 21. Gui, L., Longo, J., and Stern, F., (2001),“Towing tank PIV measurement system, data anduncertainty assessment for DTMB model 5512,”Experiments in Fluids,31, pp.336-346. 22. Westerweel,J., (1997),“Fundamentals of digital particle image velocimetry,”Measurementand Science Technology, Vol. 8, pp. 1379-1392. 23. Bhagwat, M.J. and Leishman, J.G., (2001),“Transient rotor inflow using a time-accurate free-vortex wake model,” 39th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada.
确定













还剩13页未读,是否继续阅读?

产品配置单


北京欧兰科技发展有限公司为您提供《船舶,机动运行特性,吊舱,螺旋浆,推进动态过程中速度场,速度矢量场检测方案(粒子图像测速)》,该方案主要用于船舶中速度场,速度矢量场检测,参考标准--,《船舶,机动运行特性,吊舱,螺旋浆,推进动态过程中速度场,速度矢量场检测方案(粒子图像测速)》用到的仪器有德国LaVision PIV/PLIF粒子成像测速场仪、Imager LX PIV相机
相关方案
更多
该厂商其他方案
更多