推荐厂家
暂无
暂无

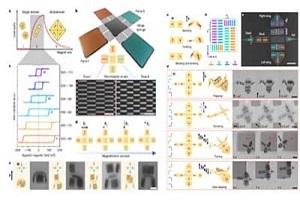





http://ng1.17img.cn/bbsfiles/images/2015/02/201502051643_534444_2972800_3.jpg 益择网讯(慕雪/编译)20世纪中期,硅电子芯片的发明将电子行业带入小型化时代,而如今,纳米级机器设备方兴未艾。近日,加利福尼亚大学的约瑟夫教授团队发明了一种新型纳米机器人光刻方法,利用纳米机器人在感光材料表面游动来制造组成传感器和纳米电子器件的组件,该技术比目前最先进的如电子束直写等纳米材料制备方法更便宜、更简单,并且可以广泛用于医疗、环境、安全等领域。团队开发了两种纳米机器人:一种是由二氧化硅制成能够像近场透镜那样聚光的球形纳米机器人,另一种是由金属制成的可以遮光的棒状纳米机器人。每个机器人都利用过氧化氢燃料溶液催化分解产生的能量来行动。当光刻胶表面暴露于紫外线下时,球形纳米机器人控制并放大光束,沿着行走创建一个沟槽图案,而杆状纳米机器人挡光并创造脊形图案。“我们的纳米机器人可以像微生物那样精确控制自己的速度和空间运动,并能自我组织来实现集体目标。”约瑟夫教授说。“虽然该方法不能完全取代像电子束直写这样的尖端技术,但是它成本更低、操作更便捷,而且能实现大部分功能,因此其应用前景十分广阔。”
小米进军机器人领域:推出仿生四足机器人,售价9999元。该机器人名为CyberDog,中文名铁蛋。CyberDog仿生四足机器搭载高精度环境感知系统,全身11个高精度传感器向AI大脑实时传输信息,可以感知图像、光线、距离、速度、声音等环境信息,还原更真实的生物反应。(新浪)
纳米医学畅想 纳米医学的研究内容十分广泛,最引人注目的是扫描隧道显微镜(STM)。这一非凡的仪器于80年代初研制成功,可以在纳米尺度上获取生命信息,研究者相继得到了左旋DNA、双螺旋DNA的碱基对、平行双螺旋DNA的STM图像。我国科学家利用STM成功的拍摄到表现DNA复制过程中一瞬间的照片。目前,研究已涉及到氨基酸、人工合成多肽、结构蛋白和功能蛋白等领域。 纳米使单位体积物质储存和处理信息的能力提高百万倍以上,人类有可能将存储了全部知识的纳米计算机安放在人脑中,或许有一天,图书馆就在我们的头脑内,每一个人都可能成为爱因斯坦、牛顿,老年性痴呆、记忆丧失等病症将会得到彻底治愈。纳米计算机可能用来读出人脑内的内容及品性,将一个脑内的信息转录到另一个脑内,这个脑可以是人脑,也可以是电脑。纳米医学也有可能改变人类自身,让人类成为能在天上飞、水中游,能进行光合作用或能在恶劣环境下生存的“超人”。将来,掌握纳米医学技术的医生,不仅能够“修理人”——治病,而且能够“改造人”——使其具有特殊功能。虽然这些设想有些离奇,但决非是毫无科学根据的幻想。即将进入临床应用的有:利用纳米传感器获取各种生化信息和电化学信息。已经取得重大成果的还有DNA纳米技术,主要应用于分子的组装。 已经在医药领域得到成功的应用。人们已经能够直接利用原子、分子制备出包含几十个到几百万个原子的单个粒径为1-100纳米的微粒。最引人注目的是作为药物载体,或制作人体生物医学材料,如人工肾脏、人工关节等。在纳米铁微粒表面覆一层聚合物后,可以固定蛋白质或酶,以控制生物反应。由于纳米微粒比血红细胞还小许多,可以在血液中自由运行,因而可以在疾病的诊断和治疗中发挥独特作用。 当把二氧化肽做到粒径为几十纳米时,在它的表面会产生一种叫自由基的离子,能破坏细菌细胞中的蛋白质,从而把细菌杀死。例如用二氧化肽处理过的毛巾,只要有可见光照射,上面的细菌就会被纳米二氧化肽释放出的自由基离子杀死,具有抗菌除臭功能。 将药物粉末或溶液包埋在直径为纳米级的微粒中,将会大大提高疗效、减少副作用。纳米粒可跨越血脑屏障,实现脑位靶向。另外,纳米粒脉管给药,可降低肝内蓄积,从而有利于导向治疗。纳米粒中加入磁性物质,通过外加磁场对其导向定位,对于浅表部位病灶治疗具有一定的可行性。在影像学诊断中,纳米氧化铁在病灶与正常组织的磁共振图像上,会有较大的对比度。 纳米粒用作药物载体具有下述显著优点:(1)可到达网状内皮系统分布集中的肝、脾、肺、骨髓、淋巴等靶部位;(2)具有不同的释药速度。(3)提高口服吸收药物的生物利用度。(4)提高药物在胃肠道中的稳定性。(5)有利于透皮吸收及细胞内药效发挥。如:载有抗肿瘤药物阿霉素的纳米粒,可使药效比阿霉素水针剂增加10倍。目前已在临床应用的有免疫纳米粒、磁性纳米粒、磷脂纳米粒以及光敏纳米粒等。 医用纳米机械或纳米微型机器人可潜入人体的血管和器官,进行检查和治疗,使原来需要进行大型切开的手术成为微型切开或非手术方式,并使手术局部化。纳米医用机器甚至可以进入毛细血管以及器官的细胞内,进行治疗和处理。这类机器可以将对人体的伤害减小到最低程度。含有纳米计算机的、可人机对话的、有自身复杂能力的纳米机器人一旦制成,能在一秒钟内完成数十亿个操作动作。如果数量足够多,就可以在几秒或几分钟内完成现今需几天或几个月甚至几年、几十年才能完成的工作。 和细胞一样,作业中坏了的微型机械可以随时被更换或修理。微型机械发展的顶峰,或许是可以自己增殖繁衍的纳米机器人。别以为以上设想不可思议。纳米科学家们相信这种愿望能够实现。 不难想象,倘若人类能直接利用原子、分子进行生产活动,这将是一个“质”的飞跃,将改变人类的生产方式和空前地提高生产能力,并有可能从根本上解决人类面临的诸多困难和危机,开创医学新纪元。

 400-629-8889
400-629-8889
 留言咨询
留言咨询
 400-860-5168转4543
留言咨询
400-860-5168转4543
留言咨询
 400-860-5168转2623
留言咨询
400-860-5168转2623
留言咨询










 我要推广仪器
我要推广仪器
 下载APP
下载APP


