
视频号

抖音号

哔哩哔哩号

前沿资讯手机看



分享到微信朋友圈
打开微信,点击底部的“发现”,
使用“扫一扫”即可将网页分享到朋友圈。
在生物医学研究中,对生物颗粒(如细胞和生物组织)的操作,特别是捕获和运输,是各种生物应用的基础。许多工具和驱动系统被设计用来提高操作的准确性和效率。磁驱动机器人具有精确操纵粒子或生物组织的能力,在生物医学、生物工程和生物物理学领域具有重要的潜力。然而,具有预定形状的刚性机器人的变形能力是有限的,这限制了其在狭小的空间的运动。
近日,北京航空航天大学机械工程学院仿生与微纳研究所冯林副教授等研发了一种可变小型机器人,该机器人是利用具有磁性和流体性质的铁磁流体这一新型材料所研制的。该磁流体基机器人不仅可以根据不同的磁场的分布形成不同的形状,从而完成不同的任务;并且还可以借助于操作平台的疏水处理,使得磁流体基机器人与基板间的摩擦减小,进而简单高效地提高了机器人的实际输出力。
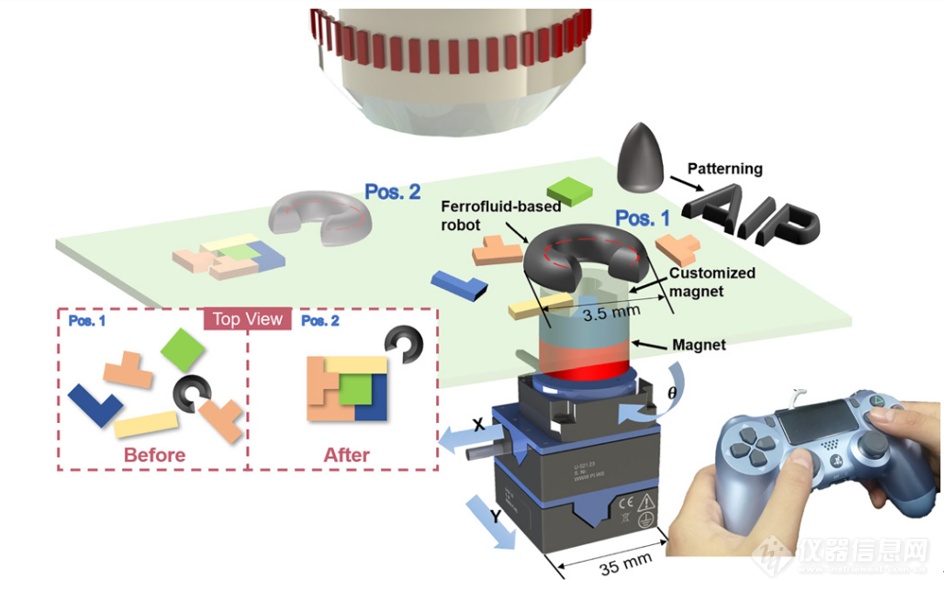
图1. 通过多种形状的永磁铁产生的集中磁场改变磁流体形状进而达到搬运不同模块的目的
为了证明这种磁流体基机器人所具有的且刚性机器人所欠缺的实际应用能力,作者设计了几个验证实验:1.制造不同形状的永磁体并磁化,观察不同磁场下磁流体基机器人的变形情况;2. 打印不同形状的模块,测试磁流体机器人的搬运能力;3.打印狭缝,测试机器人穿越窄缝的性能。通过采用PμSL 3D打印技术(nanoArch S140,摩方精密),实现了验证实验中的搬运模块、永磁模具及狭缝的精密制造。
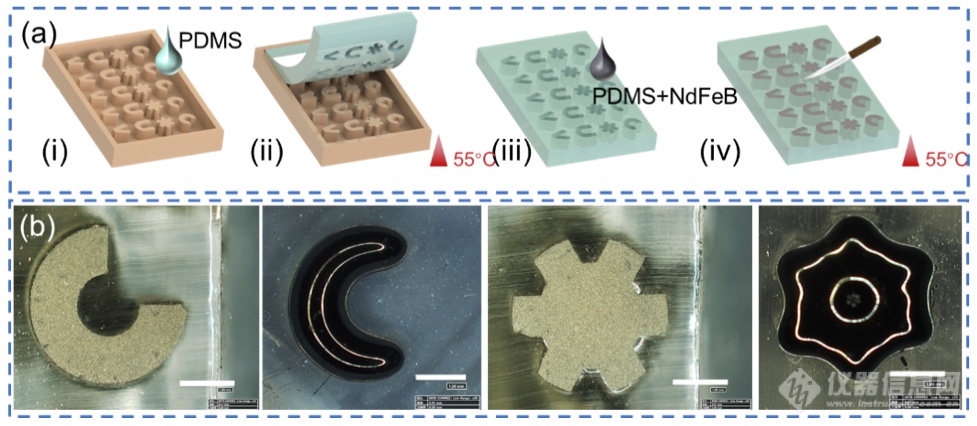
图2. 永磁体的制造流程及磁流体基机器人的变形
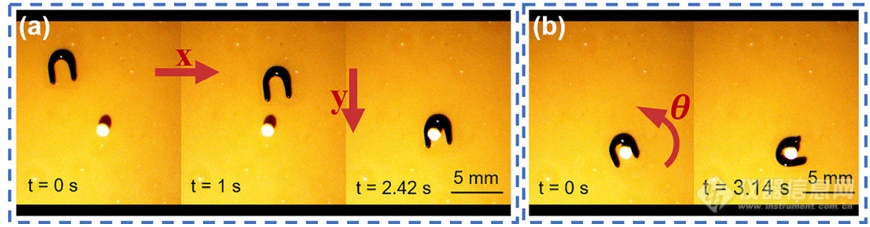
图3. 磁流体基机器人在平面上的三自由度运动
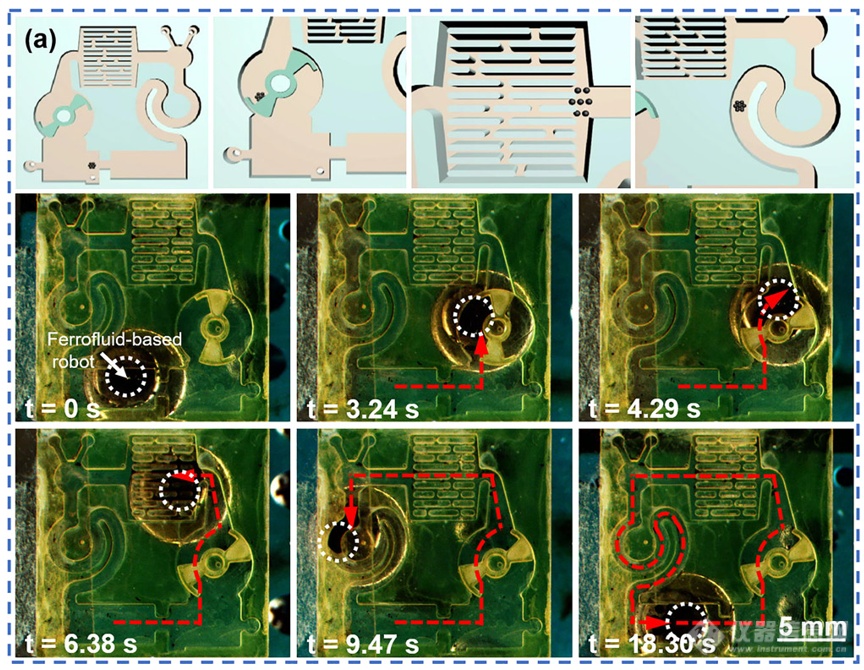
图4. 磁流体基机器人穿越狭缝动画及实物演示
该项研究成果获得国家重点研发计划(No.2019YFB1309700)及北京新星科技计划项目(No. Z191100001119003)支持,以“Deformable ferrofluid-based millirobot with high motion accuracy and high output force”为题发表于国际期刊《Applied PhysicsLetters》(北京航空航天大学陈迪晓硕士为第一作者)。
文章链接:
https://doi.org/10.1063/5.0042893
[来源:深圳摩方新材科技有限公司]
 第二届全国光谱大会圆满落幕
直击!SNEC 2021捷锐风采
第二届全国光谱大会圆满落幕
直击!SNEC 2021捷锐风采
2024.05.30


大咖云集!摩方牵头“十四五”国家重点研发计划项目正式启动!实施方案论证会在京召开
2024.05.13

新品发布 蓄势而来|摩方精密邀您共聚TCT Asia 2024!
2024.04.25

TCT访谈|硬核科技全球首发,摩方精密加速发力工业级3D打印
2024.04.24

品牌合作伙伴






























版权与免责声明:
① 凡本网注明"来源:仪器信息网"的所有作品,版权均属于仪器信息网,未经本网授权不得转载、摘编或利用其它方式使用。已获本网授权的作品,应在授权范围内使用,并注明"来源:仪器信息网"。违者本网将追究相关法律责任。
② 本网凡注明"来源:xxx(非本网)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,且不承担此类作品侵权行为的直接责任及连带责任。如其他媒体、网站或个人从本网下载使用,必须保留本网注明的"稿件来源",并自负版权等法律责任。
③ 如涉及作品内容、版权等问题,请在作品发表之日起两周内与本网联系,否则视为默认仪器信息网有权转载。
![]() 谢谢您的赞赏,您的鼓励是我前进的动力~
谢谢您的赞赏,您的鼓励是我前进的动力~
打赏失败了~
评论成功+4积分
评论成功,积分获取达到限制
![]() 投票成功~
投票成功~
投票失败了~







