
 关注
关注
已关注
![]() 已认证
已认证
粉丝量 0




更多![]()

更多![]()
静态检测和分析 Static Calibration and Analysis HDL-64E S2
The static calibration and analysis of the Velodyne HDL-64E S2 scanning LiDAR system is presented and analyzed. The mathematical model for measurements for the HDL-64E S2 scanner is derived and discussed. A planar feature based least squares adjustment approach is presented and utilized in a minimally constrained network in order to derive an optimal solution for the laser’s internal calibration parameters. Finally, the results of the adjustment along with a detailed examination of the adjustment residuals are given. A three-fold improvement in the planar misclosure residual RMSE over the standard factory calibration model was achieved by the proposed calibration. Results also suggest that there may still be some unmodelled distortions in the range measurements from the scanner. However, despite this, the overall precision of the adjusted laser scanner data appears to make it a viable choice for high accuracy mobile scanning applications.
其他
2012/06/19
更多![]()
Veloview (开源免费)激光雷达数据重构软件 64bit(位)
VeloView可的HDL传感器(HDL-64E,HDL-32E,VLP-32,VLP-16,Puck,Puck Lite,Puck HiRes)实时捕捉3D LiDAR数据进行实时可视化和处理。 有关VeloView功能的介绍可以视频形式提供: VeloView可以播放存储在.pcap文件中的预先录制的数据,并可以将实时流录制为.pcap文件。 HDL传感器扫描360°的激光器阵列(16,32或64)和40°/ 20°的垂直视场,频率为5-20Hz,每秒捕获大约一百万点(HDL-32E:~700,000pt /秒; HDL-64E:~1.3万亿比特/秒)。 VeloView提供工具来显示,选择和测量有关从传感器捕获的点的信息。 VeloView将激光雷达的距离测量结果显示为点云数据,并支持多个变量的自定义颜色图,例如返回强度,时间,距离,方位角,双返回类型和激光ID。 数据可以CSV格式导出为XYZ数据,或者只需按一下按钮即可导出当前显示的点云的屏幕截图。 功能:可配置的侦听端口;收到的转发数据转发到另一个端口或/和IP地址;显示当前帧的每分钟转数;选择点的双重回报的工具 球形和盒形模式下的裁剪工具;支持HDL-64双模和即时校准数据 支持VLP-32a,VLP-32b,VLP-32c,Puck Hi-Res和Puck LITE 基于GPS和IMU数据进行地理配准的基础设施 用于执行基于SLAM的映射的基础设施,包括和不包含GPS / IMU。见下面的例子。此功能尚未完全可用。 可视化0距离返回,空帧,强度校正和原始数据的高级选项(无方位角调整) 用户可配置的播放速度;底层ParaView版本现在是版本5.1.2,提供了许多新工具;从实时传感器流或记录的.pcap文件输入 LiDAR的可视化以3D +时间返回,包括3D位置和属性数据,如时间戳,方位角,激光id等;LiDAR属性的电子表格检查器 从传感器记录到.pcap;导出为CSV或VTK格式;记录和导出GPS和IMU数据;标尺工具;可视化GPS数据的路径;同时显示多个数据帧&#823&#823 更多产品及资料,请关注誉荣官网:www.famouset.com
341KB
2018/09/28
NEWADC,HDL32E激光雷达Lidar-ADC校准-英文 2018-9月
NEWADC,HDL32E激光雷达Lidar-ADC校准-英文 原厂文件,英文版,最新ADC校准文件 更多产品及资料,请关注誉荣官网:www.famouset.com
201KB
2018/09/26
HDL-32E,VLP-16,VLP-32-velodyne激光雷达Lidar-控制连接盒连接说明-英文 2018年9月
HDL-32E,VLP-16,VLP-32-velodyne激光雷达Lidar-控制连接盒连接说明-英文 原厂文件,英文,介绍控制连线盒的结构,连接方法。 更多产品及资料,请关注誉荣官网:www.famouset.com
648KB
2018/09/26
HDL-32E&VLP-16-velodyne激光雷达Lidar-快速使用指南-英文 2018-9月
HDL-32E&VLP-16-velodyne激光雷达Lidar-快速使用指南-英文 原厂文件,英文版,介绍32线和16线的快速设定方式,电脑如何与雷达连接及通讯,TCP/IP协议端口设定等 更多产品及资料,请关注誉荣官网:www.famouset.com
12476KB
2018/09/25
VLP16激光雷达Lidar-镜头清洁程序-英文 2018年9月
VLP16激光雷达Lidar-镜头清洁程序-英文 原厂文件,英文版,介绍雷达镜头的擦拭和清洁方法 更多产品及资料,请关注誉荣官网:www.famouset.com
727KB
2018/09/25
HDL-32E-velodyne激光雷达Lidar-数据包结构和时间定义-英文 2018-9月
HDL-32E-velodyne激光雷达Lidar-数据包结构和时间定义-英文 原厂文件,英文版,介绍雷达采集数据包的结构,字节代表定义 需要更多资料,请留下详细的信息和联系方式
0KB
2018/09/25
HDL-32E激光雷达Lidar-数据包结构和时间定义-英文 2018-9月
HDL-32E激光雷达Lidar-数据包结构和时间定义-英文 原厂文件,英文版,介绍雷达采集数据包的结构,字节代表定义 更多产品及资料,请关注誉荣官网:www.famouset.com
911KB
2018/09/25
激光雷达 Lidar-三款型号参数比较表-英文 2018-9月
激光雷达 Lidar-三款型号参数比较表-英文 2018-9月 原厂文件,用于区分三款激光雷达,帮助选择合适的型号。 更多产品及资料,请关注誉荣官网:www.famouset.com
149KB
2018/09/25
PuckHi-Res激光雷达Lidar宣传彩页-彩页-英文 2018-9月
PuckHi-Res激光雷达Lidar宣传彩页-彩页-英文 英文资料,官方原版。 更多产品及资料,请关注誉荣官网:www.famouset.com
347KB
2018/09/16
HDL-32E激光雷达Lidar宣传彩页-彩页-英文 2018-9月
HDL-32激光雷达Lidar宣传彩页-彩页-英文 官方样本,附有参数,英文版。 更多产品及资料,请关注誉荣官网:www.famouset.com
431KB
2018/09/14
VLP-32激光雷达Lidar-操作手册-英- 2018-9月
VLP-32激光雷达Lidar-操作手册-英- 2018-9月 官方文件,英文版,随机手册,操作手册 更多产品及资料,请关注誉荣官网:www.famouset.com
14676KB
2018/09/07
HDL32E激光雷达Lidar-操作手册-英- 2018-9月
HDL32E激光雷达Lidar-操作手册-英- 2018-9月 操作手册,随机文件,英文版,Velodyne官方文件 更多产品及资料,请关注誉荣官网:www.famouset.com
15144KB
2018/09/07
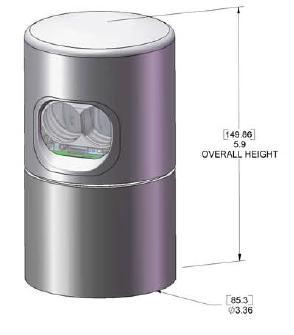
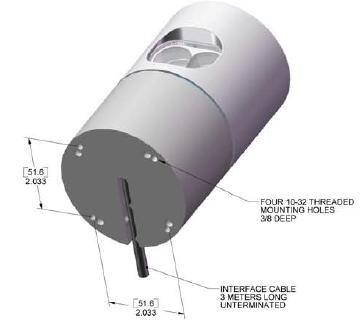
32E 激光雷达 操作手册
32E 激光雷达 操作手册 免费下载 包括32E的尺寸,电子信号,操控说明,内部架构等信息说明 更多产品及资料,请关注誉荣官网:www.famouset.com
2133KB
2012/05/18
静态检测和分析 Static Calibration and Analysis HDL-64E S2
The static calibration and analysis of the Velodyne HDL-64E S2 scanning LiDAR system is presented and analyzed. The mathematical model for measurements for the HDL-64E S2 scanner is derived and discussed. A planar feature based least squares adjustment approach is presented and utilized in a minimally constrained network in order to derive an optimal solution for the laser’s internal calibration parameters. Finally, the results of the adjustment along with a detailed examination of the adjustment residuals are given. A three-fold improvement in the planar misclosure residual RMSE over the standard factory calibration model was achieved by the proposed calibration. Results also suggest that there may still be some unmodelled distortions in the range measurements from the scanner. However, despite this, the overall precision of the adjusted laser scanner data appears to make it a viable choice for high accuracy mobile scanning applications.
519KB
2012/06/19
誉荣电子科技有限公司
公司地址
北京市海淀区车道沟南里34
客服电话
公司名称: 誉荣电子科技有限公司
公司地址: 北京市海淀区车道沟南里34 联系人: 销售经理 邮编: 100089
仪器信息网APP

展位手机站